Egy új projekt vette kezdetét, mely a Nemzetközi Űrállomás külső falán közlekedő robotok kifejlesztését célozza. Az alapötletet a gekkók talpának mesterséges másolata adta, a tapadófelületet most súlytalanságban is alaposan letesztelik.
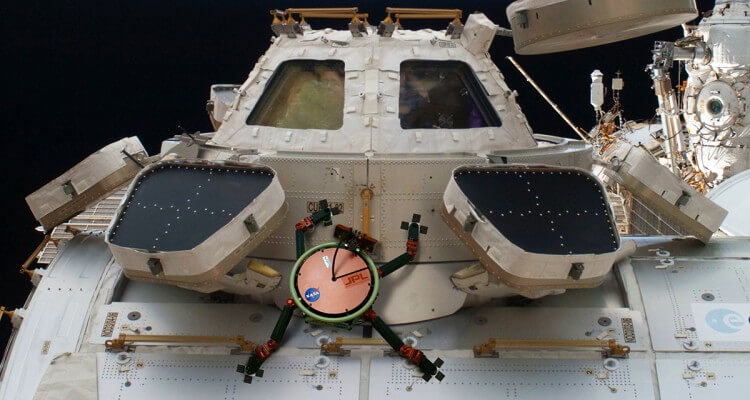
Kép: NASA
A Nemzeközi Űrállomás másnéven az ISS, legújabb ellátmányában már helyet is kapott egyik kísérleti példány. A kutatók egyik ambiciózus célja, hogy nemsokára az ISS külső falán „mászkáló” robotokkal végezzenek el bizonyos javítási és karbantartási feladatokat.
Korábbi cikkünkben már olvashattak a gekkók lábán található különösen tapadós felület mesterséges anyagokkal történő reprodukálásáról. A dolog nyitját az apró szőrszálak jelentik, melynek köszönhetően akár a függőleges falon való járásra is képesek ezek a kis lének. Parabolarepülések segítségével már végeztek súlytalansági kísérleteket a mesterséges tapadófelülettel, mely során arra jutottak, hogy az egyik lehetséges alkalmazási területe a föld körül keringő űrszemét begyütése is lehetne.
A parabolarepülések alkalmával, mintegy 20 másodperces súlytalansági időszakok alatt már sikeresen vizsgáztak a „lemásolt” gekkólábak, 10 és 100 kg tömegű testek megragadásával. A hamarosan kezdődő kísérletsorozatban az ISS-en az űrhajósok felhelyezik a rendszert az űrállomás falának belsejére, és megfigyelik, hogyan viselkedik sokkal hosszabb időn át a súlytalanság körülményei között. Összesen öt különböző méretű eszközt próbálnak ki változatos körülmények között, 30-féle típusú felületen.