Az előző részben a robotkart mozgató hajtásokkal, motorokkal foglalkoztunk, most pedig azokat a mechanizmusokat tekintjük át röviden, amelyek - a közvetlen hajtásoktól eltekintve - a motor és az ízület között megtalálhatók. Ezen mechanizmusok a következőképpen csoportosíthatók:
- Forgó mozgásból forgó mozgást ("sebességváltó")
- Forgó mozgásból lineáris mozgást
- Lineáris mozgásból forgó mozgást
- Lineáris mozgásból lineáris mozgást ("áttétel")
A hullámhajtómű
Ez a hajtómű az első csoportba tartozik, mivel mind be-, mind kimenő mozgása forgás. A robotkarok mozgatásánál igény, hogy kis tömegű, nagy fordulatszámú motorral mozgassunk kis fordulatszámú (szögsebességű) robotkart, mégpedig nagy nyomatékkal. Ez egy igen nagy áttételű "sebváltóval" megoldható, ám nagy méretű, nehéz fogaskerekek sorát nem tehetjük ergy robotkarra. A hullámhajtómű (harmonic drive) úgy valósít meg nagy áttételt, hogy tömege, mérete sokkal kisebb marad.
Működési elv:
A baloldali ábrán látható hullámhajtómű három fő alkatrésze a hullámgenerátor (kék), a hullámkerék (fekete) és a gyűrűkerék (piros)
A hullámgenerátort tekintsük most egy ovális acéltengelynek, a hullámkereket egy gumiból készült külső fogazású keréknek, a gyűrűkereket pedig egy fixen rögzített acél belsőfogazású keréknek, melynek fogszáma esetünkben kettővel nagyobb mint a hullámkeréké. A hajtómű bemenete a hullámgenerátor.
Ahogy forgatjuk a hullámgenerátort, az a hullámkerék fogait sorba belepréseli a gyűrűkerék fogai közé. Mivel a hullámkerék fogszáma (esetünkben) kettővel kisebb, mint a gyűrűkeréké, nyilvánvaló, hogy a hullámgenerátor egyszeri körbefordulásának eredményeképpen a hullámkerék 2 fognyit elfordul. A hajtásunk kimenete a hullámkerék. Rájöhetünk, hogy a be- és kimenet forgásiránya ellentétes, az áttétel pedig a hullámkerék fogszámának és a fogszám-különbségnek a ... függvénye. Az első 10 kolléga, aki a pid@pid.hu címre megküldi az áttétel pontos képletét, kap egy reklámbögrét! (F.S.) 
Hogy a valóságban hogyan néz ki egy hullámhajtómű belseje, azt a baloldali képen láthatjuk.
A harmonikus hajtással a gyakorlatban max. 1:200 áttételt szokás megvalósítani, határ a kimenő nyomaték, ami már itt is óriási, és nagyon igénybe veszi a hullámkerék anyagát.
Forgóból lineáris
Ezek a hajtások nagyban felelősök a hidraulikus és pneumatikus hajtások visszaszorulásáért. Működési elvüket tekintve leggyakrabban golyós-orsós, fogasléces, fogazott-szíjas modellekkel találkozhatunk.
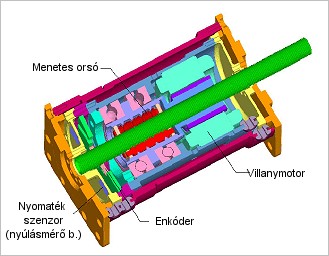
A baloldali képen egy menetes orsós mechanikával és villamos motorral egybeépített lineáris hajtás látható. A hajtás kinyúlása 100 mm, az enkódere 10 bites (1024 lépés), tehát a felbontás kb. 0.1 mm.
Egy ilyen - 700 gramm tömegű - hajtással 1000N rúderőt ki lehet fejteni!
Linerisból forgó
Korszerű roboton ezzel többnyire akkor találkozunk, mikor egy nagy terhelhetőségű csukló ízületet (rakodó robot) hidraulikus munkahengerrel mozgatnak, mint egy autódarut. A mechanika itt általában egykarú emelő.
Lineárisból lineáris
Pantográf karszerkezettel, kétkarú emelőkkel elméletileg kivitelezhető, a gyakorlatban azonban nem alkalmazzák.
Ellensúlyozás

Ha a - függőlegesen emelendő - robotkar és a munkadarab együttes súlya nagy, a hajtás teljesítményének csökkentése érdekében szükségessé válhat ellensúlyozás alkalmazása. Ezt a gyakorlatban a gémeskutakra emlékeztető ellensúly, vagy rugó használatával szokás megoldani. Az ellensúly (jobboldali képünkön a bal felső sarokban) előnye, hogy a mozgás teljes tartományában azonos ellenerőt fejt ki, hátránya viszont, hogy a kar tehetetlenségét növeli.
A rugónak gyakorlatilag nincs tehetetlensége, a rugóerő viszont lineárisan függ az elmozdulástól, azaz nem állandó.
Összetett berendezés
A baloldali ábrán a vezérlőszekrény (controller) főbb elemeit láthatjuk. A szekrényben mindig találunk egy központi számítógépet, melynek feladata sokrétű: Tárolja a robot programját, vezérli a hajtások összehangolt mozgatását, lehetővé teszi a programozást és diagnosztikát, stb...
A robotkar mozgatómotorjai és a computer közötti illesztést tengelyenként külön kártya (szervóhajtás) végzi. Ezeket az alkalmazott motorokhoz kell választani, általában rack-rendszerben cserélhetőek.
A robotkaron levő elmozdulás- és elfordulásérzékelők jelei ma már gyakran nagysebességű buszon jutnak a vezérlőbe, de szükség van két- vagy többállapotú fizikai ki- bemenetek kezelésére is. Lehet a robotkaron pl. egy mágnesszelep, megfogó, stb.
A klasszikus módszer

A baloldali képen látható a klasszikus robotvezérlő szekrény. Ebben a computer még gyártóspecifikus, csakúgy mint a rajta futó operációs rendszer és egyéb alkalmazások. A kezelőfelület egy szintén gyártóspecifikus eszköz, rajta praktikusan elhelyezett funkcióbillentyűkkel, esetleg érintőképernyővel, botkormánnyal kiegészítve. A feldolgozóipari folyamatirányításban hasonló kategóriát jelentenek a klasszikus DCS-ek.
A törtető PC
A robotok világát sem kerüli el a PC rohamos előretörése. A baloldali képen egy PC-alapú robotvezérlőt látunk. Ezek tulajdonképpen nem mások, mint ipari PC-k, rajtuk többnyire kereskedelmi forgalomban kapható valósidejű operációs rendszerekkel. Piacvezető a VxWorks, vagy a Windows CE.

Az IPC a hajtásokkal és a fizikai I/O-val, terepi buszillesztővel nagysebességű szabványos buszon kommunikál. Egyre gyakrabban találkozhatunk az Ethernettel e szerepkörben is. PC alkalmazása esetén a kezelőeszközök is a PC-s világból ismertek, leggyakoribb a monitor + billentyű + egér felállás, de kiegészülhet cégspecifikus kezelőtáblával is.
Változó szoftverkörnyezet
Míg a "klasszikus" kategóriában a teljesen saját fejlesztésű szoftverek dominálnak, az új módi szerint a robot teljes szoftverrendszerét az op. rendszer szolgáltatásait kihasználva készítik. Windows környezetben ez pl. az ActiveX-re való támasz- kodást jelenti.
Természetesen a valósidejű vezérlésről nem a kezelő felé mutatott op.rendszer gondoskodik, hanem egy - a felhasználótól függetlenül futó - RTOS. A kettő közötti kapcsolat azonban oly magas szintű és észrevehetetlen, hogy programozás, diagnosztika közben erről meg is feledkezhetünk.